Alasan saya mencoba membangun Robot Autonomous Quadruped
Alasan saya nekat rakit Robot Autonomous Quadruped dari nol. Dari tantangan teknis, belajar Robotika & AI, hingga bikin mainan 'hidup' buat anak.
Sebelum saya curhat di sini dari sisi teknikal, saya mau cerita sedikit mengenai keputusan saya dengan sadar mengisi waktu-waktu gabut saya (saat ada waktu gabut) dengan membangun Robot Autonomous Quadruped, , bukan robot biasa yang bergerak menggunakan roda, tapi yang punya empat kaki dan bisa jalan sendiri tanpa remote.
Sekali lagi saya mau menegaskan, bahwa ini bukan proyek “wah keren” doang bagi saya, tapi memang dari hati saya ingin mencoba membangun ini sedikit demi sedikit dengan tangan saya secara penuh dari 0 (nol). Saya mau kasih sedikit gambaran (untuk yang belum tahu) soal apa itu robot autonomous quadruped dan kenapa saya pilih bentuk quadruped ini daripada yang lebih gampang pakai roda (yang umum dilakukan para peng-hobi).
Apa Itu Robot Autonomous Quadruped?
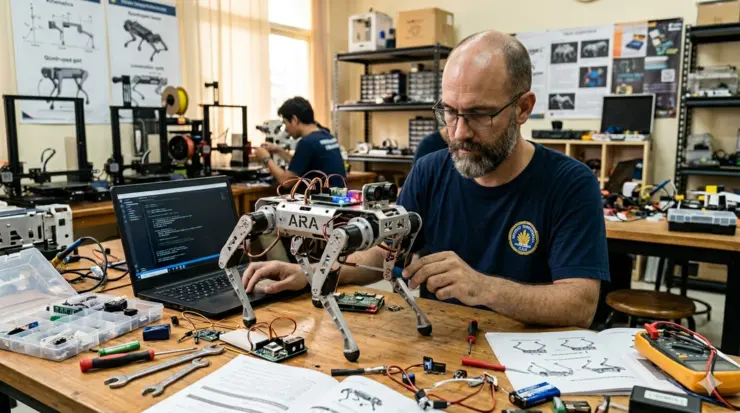
Sederhana-nya, robot autonomous quadruped adalah robot yang berjalan menggunakan empat kaki (quadruped) dan bisa beroperasi sendiri tanpa dikendalikan manusia setiap saat, hanya melalui perintah atau reaksi dari sesuatu sebagai trigger-nya.
“Autonomous” sendiri artinya robot ini punya kemampuan untuk mengambil keputusan sendiri atau memberikan reaksi tertentu berdasarkan data dari sensor-sensor yang dipasang. Ia bisa memberikan respon dari input apapun, seeprti microfone, kamera, dan sensor sensor lain nya yang akan dipasangkan kedalam tubuh robot-nya, jadi bukan dikendalikan oleh remote seperti pada umum-nya, atau seperti Robot Polisi yang tempo hari kita lihat di banyak media (upsss).
Bayangkan robot anjing kecil yang bisa jalan sendiri di rumah, tapi ini versi DIY yang dibangun dari nol. Keren kan? (paling tidak itu yang ada dikepala saya)
Kenapa Harus Quadruped, Bukan Robot Beroda yang Lebih Gampang?
Saya punya beberapa alasan pribadi yang bikin saya tetap memilih quadruped. Ini bukan alasan “biar kelihatan keren” doang, tapi memang dari pertimbangan yang saya pikirkan matang-matang, karna jujur bukan perkara mudah implementasi Quadruped ini dibanding robot beroda. Jadi ini salah banyak alasan-nya
1. Lebih menantang (dan itu yang saya cari)
Membangun robot berkaki, berarti saya harus berhadapan dengan persiapan dan perhitungan yang jauh lebih rumit dibanding robot roda.
Mulai dari manajemen berat total robot yang langsung mempengaruhi pilihan servo yang digunakan, konsumsi baterai (karena target saya robot harus bisa nyala beberapa jam), sampai logika inverse kinematics yang harus diatur supaya kakinya bergerak lebih natural, belum lagi kolaborasi dengan sensor IMU (gyroskop + akselerometer + magnetometer) supaya robot tetap seimbang saat jalan di permukaan yang nggak rata. Semua ini memang lebih kompleks, tapi justru itu yang bikin saya merasa tertantang, dan “Wow”
2. Bisa dijadikan mainan sekaligus teman bermain anak saya (Setelah jadi)
Jadi saya ingin robot ini bukan cuma proyek yang bisa menambah pengalaman dan kemampuan saya secara teknikal, tapi setelah jadi saya berharap bisa menjadi teman bermain buat anak saya. Robot berkaki, autonomous, dan bisa diajak berinteraksi terasa lebih nyata dibanding yang cuma muter-muter pakai roda. Anak saya bisa menyaksikan robot itu “terlihat hidup hidup” dan bergerak seperti hewan kecil. Rasanya lebih seru dan dekat buat anak-anak.
3. Wadah upgrade skill dari IoT Developer jadi Robotic Developer
Selama beberapa waktu belakangan di kantor tempat saya bekerja, saya dipercaya menangani project IoT. Sekarang saya ingin naik level ke dunia robotika, agar tidak jalan di tempat. Proyek ini jadi wadah yang pas buat saya belajar banyak hal baru di dunia robotika khusus-nya. Saya sudah bayangkan pasti banyak try and error yang nunggu di depan, dan itu menyenangkan, juga menjadi sesuatu yang melelahkan jika berkepanjangan, tapi justru itu yang saya cari. Setiap error adalah pelajaran yang bikin wawasan saya tentang robotika makin matang.
4. Ingin lebih dekat dengan AI yang diwujudkan dalam bentuk fisik
Teman teman dan Tim kantor saya banyak membahas tentang AI dan segala ke “WoW” an nya dan potensinya, dan saya belum masuk ke ranah dari sisi Implementasi. Dan sekarang saya ingin mencoba implementasi, bukan hanya mengoptimalkan potensi AI didalam layar, saya ingin dia ada di wadah fisik yang bisa berinteraksi langsung kepada saya. Robot autonomous quadruped ini jadi wadah yang pas buat mengimplementasikan AI dan membawanya seolah olah ke dalam dunia nyata.
Jadi begitulah curhatan singkat saya, kenapa saya akhirnya memilih bikin robot autonomous quadruped. Bukan karena paling gampang, tapi justru karena paling menantang dan paling bermakna buat saya dan mungkin anak-anak saya.
Proyek ini masih sangat panjang perjalanannya. Kalau kalian tertarik ikut nemenin perjalanan saya dari nol sampai robot ini bisa terlihat hidup, stay tuned ya! Nanti saya akan share step by step yang sudah saya lewati pada Blog ini, mulai alasan dari pemilihan komponen sampai logika kodingan yang saya implementasikan.
Terima Kasih Kawan
— Prahastha